1 – Planificación de cuadricoptero
December 29, 2015
Tiempo total: 0 días con 1:8:29 hrs
Actualmente existen distintas maneras de construir un drone, desde comprar un kit con las herramientas y dispositivos electrónicos necesarios para armarlos hasta crear uno desde cero. El objetivo de este proyecto es investigar cada tecnología que un drone debe de utilizar, desde que tipo de motor, tipo de batería a comprar, sensores para lograr la estabilización, software para enviar y recibir mensajes, microcontrolador entre otros detalles.
A continuación los conceptos básicos que deben de enfrentarse para llevar a cabo el proyecto.
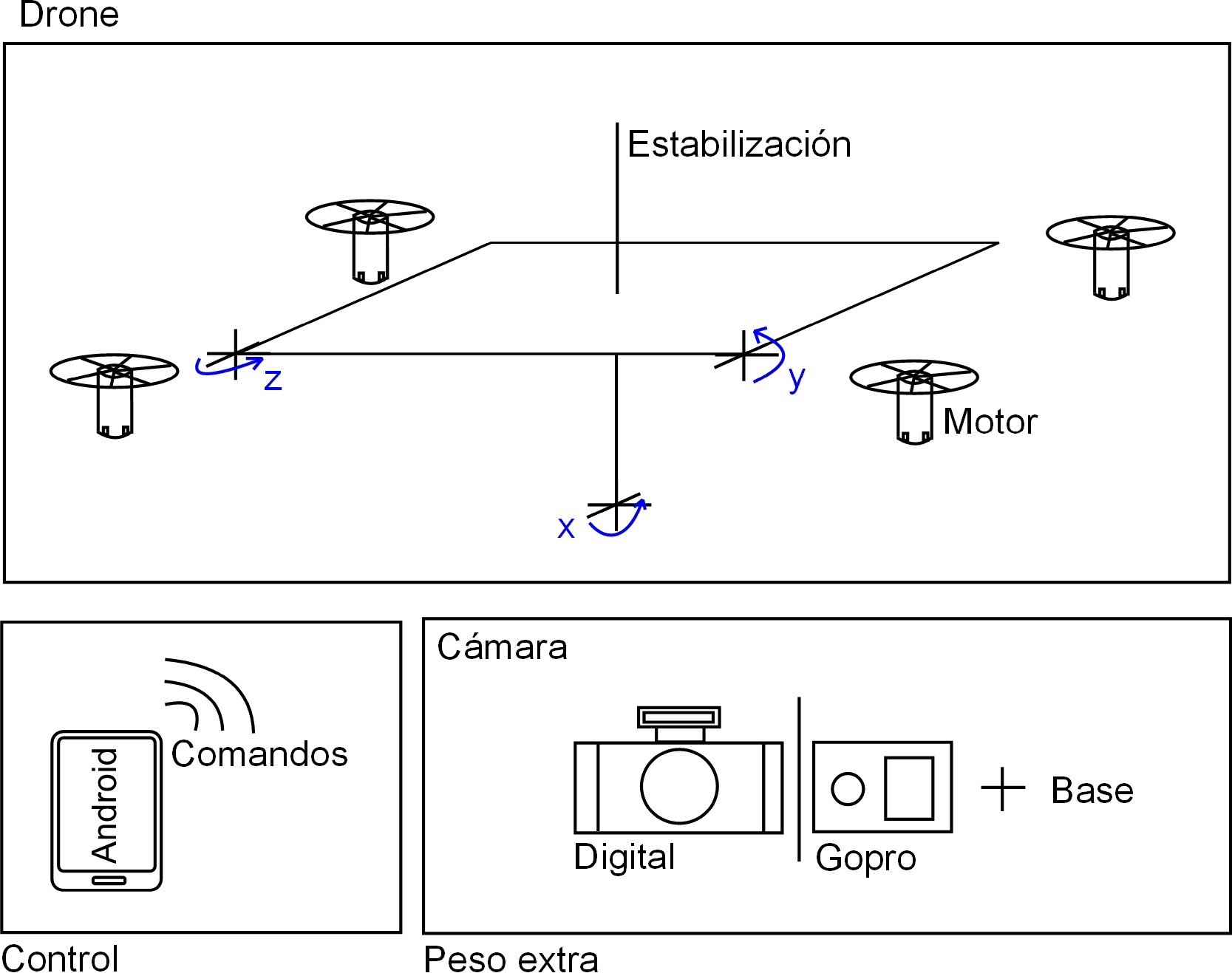
La estabilización
Se debe de utilizar sensores para obtener la posición del plano, esto se puede lograr con giroscopios digitales. El uso de este tipo de sensores, representa enviar la información necesaria a los cuatro motores para incrementar o disminuir su potencia; por este motivo, es necesario tener en cuenta las capacidades de procesamiento del microcontrolador.
Movimiento en el aire y utilización de los motores
Al ser posible conocer la posición utilizando sensores, es necesario entender cómo es que los cuatro motores funcionan, es decir cómo hacer que el drone pueda responder y llevar a cabo los movimientos básicos desde el despeje, estabilización, movimientos hacia arriba, abajo, adelante, atrás y los giros que se quieran programar.
Microcontrolador
Hasta ahora el conocimiento adquirido para el PIC16F877A es básico, pero es necesario saber qué tipo de microcontrolador es el mejor para poder rendir y responder con la rapidez suficiente para manejar el drone. Existen también plataformas de hardware open source para distintos propósitos, entre estas los arduinos, que facilitaran bastante le programación de las funciones e integración de otros componentes.
Envió de comandos
El envío de comandos utilizando wifi/bluetooth establece la limitante de la distancia por su potencia, por este motivo una de las investigaciones a realizar es la distancia máxima y costo para dispositivos de hardware de wifi/bluetooth que se puedan integrar al proyecto.
Batería
La batería mantendrá en funcionamiento los cuatro motores, el drone necesita incrementar su potencia para poder ascender el drone y estabilizarlo, lo mismo sucede con cada movimiento, por este motivo se deberá de hacer la mejor selección en la compra de la batería.
Materiales base para el drone
Un drone necesita tener una base solida que pueda soportar la tensión causada por los motores; por este motivo se deberá de investigar que material utilizar, entre los principales esta la fibra de vidrio o de carbono. De acuerdo a lo investigado, se observaran las limitantes con cada material y se deberá de decidir el diseño final del cuadricoptero.
Cámara
Los costos para integrar una cámara de alta calidad que permita enviar la vista previa al dispositivo móvil es alto, por este motivo se establecerá como meta una base que permita montar una cámara externa, para esto se debe de tener en cuenta el peso máximo que los motores pueden soportar.
Control
La solución para este proyecto es un celular con sistema operativo android, inclusive se puede utilizar su hardware y desarrollar una aplicación para controlar el drone en vez de la utilización de un microcontrolador, pero ese no es el objetivo del proyecto. El control del drone se realizara enviando la cantidad mínima de bits para todas las acciones posibles.
Conclusión
Debido a su complejidad, no se investigara el uso de telemetría, debido al alto costo en tiempo y recursos que ello conlleva; también se ha dejado afuera la integración de una cámara que envié la información al dispositivo móvil y que al mismo tiempo grabe las imágenes y videos. Las decisiones de hardware se publicaran, mostrando los resultados de las investigaciones en cada área de la construcción del drone.
